
Schrittmotoren sind unter den elektronischen Motoren insofern einzigartig, als sie sich in einer Reihe diskreter Schritte und nicht kontinuierlich bewegen. Dies ist eine nützliche Eigenschaft, da sie eine präzise und einfache Positions- und Geschwindigkeitssteuerung des Schrittmotors ermöglicht und für deren Aufrechterhaltung nicht einmal eine Rückmeldung erforderlich ist.
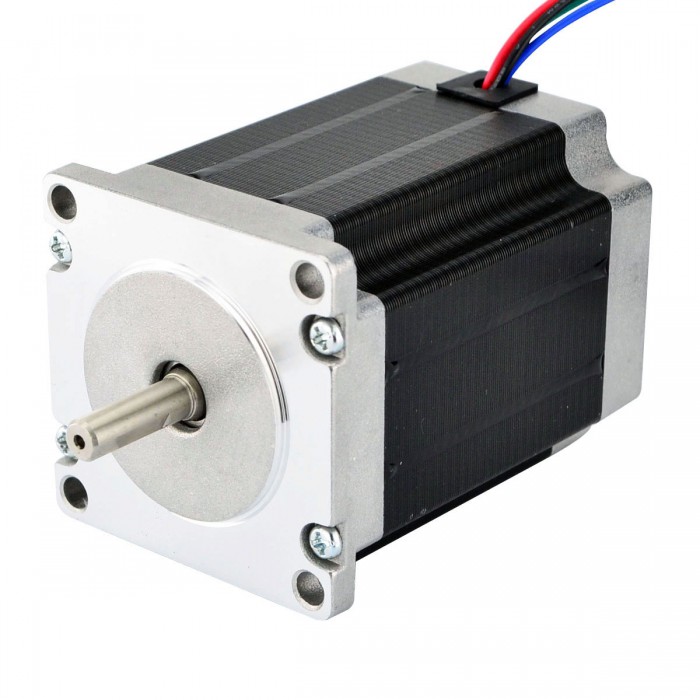
Dieser Motor hat aber auch Nachteile. Da Schrittmotoren normalerweise im offenen Regelkreis arbeiten, bemerkt die Steuerung diese fehlenden Schritte nicht; die Folge ist, dass der Motor sein Ziel nicht erfolgreich erreichen kann. Der Effekt kann so stark werden, dass der Nema-23-Schrittmotor vollständig Drehmoment verliert und aufhört, sich zu drehen. Je nach Synchronisation der Schritte kann sogar die Drehrichtung umgekehrt werden.
Erstens ist dieses Phänomen nur bei der Eigenfrequenz des Schrittmotors problematisch. Dies bedeutet, dass es nur innerhalb eines bestimmten Geschwindigkeitsbereichs funktioniert. Je nachdem, mit welcher Drehzahl Sie den Motor laufen lassen, bemerken Sie es möglicherweise gar nicht!
Zweitens braucht es Zeit, bis Resonanz entsteht. Es ist nicht so, dass Sie schlechte Geschwindigkeiten erreichen und sofort Drehmoment verlieren. Es dauert mehrere Sekunden, bis die Schwingung störende Werte erreicht. Da dieses Problem nur bei einer bestimmten Geschwindigkeit auftritt, ist es oft möglich, durch eine schlechte Gegend zu rasen, ohne auf der anderen Seite beeinträchtigt zu werden. Sie sind nur dann gefährdet, wenn Sie sich über einen längeren Zeitraum in einer rauen Gegend aufhalten.
Schließlich kann dieser Effekt durch eine Belastung des Motors stark reduziert werden. Bei Belastung des Motors erhöht sich die Trägheit und die Schwingungen werden stark reduziert.
Verwandte Artikel:https://oyostepperde.blogspot.com/2023/12/warum-werden-schrittmotoren-haufig-in.html



